|
|||||||
Role of Skin Biomechanics in Mechanoreceptor Response |
|
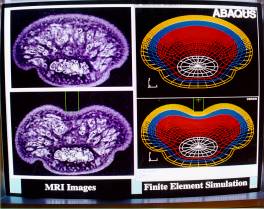
Sponsor: National Institutes of Health Grant RO1-NS33778 Project Staff: Mandayam A. Srinivasan, S. James Biggs, Balasundar I. Raju, Suvranu De, Joshua P. Cysyk, Avin C. Gidwani, Robert H. LaMotte (Yale University School of Medicine) 1. OverviewMechanics of the skin and subcutaneous tissues is as central to the sense of touch as optics of the eye is to vision and acoustics of the ear is to hearing. When we touch an object, the source of all tactile information is the spatio-temporal distribution of mechanical loads on the skin at the contact interface. The relationship between these loads and the resulting stresses and strains at the mechanoreceptive nerve terminals within the skin plays a fundamental role in the neural coding of tactile information. In spite of the fundamental importance of the sense of touch in our lives, very little is known about the mechanics and the mechanisms of touch Analysis of mechanistic models generates testable hypotheses about deformations of skin and subcutaneous tissues, and about the associated peripheral neural responses. Verification of the hypotheses can then be accomplished by comparing the calculated results with biomechanical data on the deformation of skin and subcutaneous tissues, and with neurophysiological data from recordings of the responses of single neural fibers The research under this grant is directed towards applying analytical and computational mechanics to analyze the biomechanical aspects of touch: the mechanics of contact, the transmission of the mechanical signals through the skin, and their transduction into neural impulses by the mechanoreceptors. The research work consisted of four parts: (1) to develop 2 and 3 Dimensional (3D) mechanistic models of the primate fingertip, and gradually refine them so that their geometrical and material properties are increasingly realistic; (2) to expand the variety of stimuli that are pressed or stroked on the models in simulations of neurophysiological experiments; (3) to perform a series of biomechanical experiments under in vivo conditions using a variety of techniques including videomicroscopy, Magnetic Resonance Imaging (MRI), high frequency ultrasound, and computer controlled stimulators; (4) to collaborate with Prof. LaMotte in obtaining and analyzing peripheral neural response data for a variety of tactile stimuli. During the past year, we have continued development of a novel device, the Ultrasound Backscatter Microscope (UBM), which is capable of imaging the papillary ridges as well as skin layers underneath at much higher resolution than MRI. We propose to develop this unique device further and use it to both directly observe the mechanistic phenomena in tactile sensing as well as to measure the biomechanical parameters to help improve the realism of our models. The progress described in the following sections are organized according to the research area: (1) biomechanics, (2) neurophysiology and psychophysics, (3) computational Models, (4) theory, and (5) device design and construction. 2. BiomechanicsDetermination of Compressibility and Mechanical Impedance of the Human Fingerpad In VivoFor mechanistic modeling of the human fingerpad, the Poisson's ratio, a measure of compressibility, is required. Accordingly, the Poisson's ratio for the human fingerpad in vivo was investigated. In previous noninvasive experiments on human subjects, we have measured the change in volume of the fingerpad under static indentations with different indenters. Our results show that the compressibility of the fingertip increases with increases in both the depth of indentation and the contact area with the indentor. The highest change in fingertip volume was about 5%. We have also developed an experimental setup involving a computer controlled linear actuator for fingertip volume change measurements under dynamic conditions. The results show that reductions in fingertip volume are in phase with stimulus variations, with an increase in their mean value over time. The volume changes during the ramp phase increase linearly with indentor displacement and are independent of velocity; during saw tooth stimulations, however, the nature of the hysteresis loops depend on velocity of indentation. We have also measured the force response of the human fingerpad, in vivo, to indentation by stimuli of varying geometry. A computer-controlled tactile stimulator delivered a combination of static, ramp and sinusoidal indentations normal the skin surface, with the fingerpads of subjects held stationary and passive. Both input indentation depth and fingerpad force response were recorded as functions of time to capture transients and steady state features. Three rigid metal indenters, a point, a 6.35 mm diameter circular probe and a flat plate, were used for indentation to represent three general classes of loading profiles encountered in manual exploration and manipulation. With each stimulus, repeatability of the response was tested and the effects of varying amplitude, velocity, and frequency of indentation were investigated. The experiments revealed that the force response of the fingerpad is both nonlinear and viscoelastic with respect to indentation depth and velocity. A nonlinear Kelvin model was proposed and approximated as a piecewise linear set of springs in parallel with series spring-dashpots. Parameters were estimated for each subject and indenter. These "individual" models predicted data for that particular subject and indentor very well (R2 > 0.96) but not as well for others. The means of the parameters across subjects were then used to construct more general, indentor specific versions of the model, which were able to predict better the force response of any subject's fingerpad to a given indentation. These results were used in validating 2-dimensional and 3Dimensional (3D) mechanistic models of the primate fingertip. Experimental Investigation of Frictional Properties of the Human FingerpadIn manual exploration as well as manipulation, the frictional properties of the fingerpad play a dominant role in governing the forces applied, the amount of skin stretch, and the occurrence of slip. We used a tactile stimulator to indent and stroke the fingerpads of human subjects with different indentation depths, stroke velocities, and stroke directions. Three flat plates made of glass, polycarbonate, and acrylic were used as stimulus surfaces. During stroking, the normal and shear forces were recorded by a 2-axis force sensor. A videomicroscopy system captured images of the contact region between the fingerpad and the stimulus surface while stroking. The stimulator and the videomicroscopy system were synchronized so as to match the images with the corresponding force data. The data show distinct frictional behaviors for different stimulus surfaces. For glass, the curves of normal as well as shear forces increased smoothly to steady state values. When the indentation depth was larger, the normal and shear forces were larger, but the friction coefficient was smaller. When the stroke velocity increased, the normal force was about the same for a given indentation depth, while the shear force and the friction coefficient increased. The stroke direction did not significantly influence the results. The images showed that relative motion between the fingerpad and the glass plate began at the periphery and propagated towards the center. Displacements of different finger ridges in the contact area also varied. Polycarbonate and acrylic surfaces, although similar in smoothness and appearance to glass, caused a radically different frictional behavior: stick-slip phenomenon occurred consistently all through the stroke in every trial. An analysis of the stick-slip frequency and the stick-slip shear force was conducted with respect to various indentation depths and various stroke velocities. Based on adhesion theory a hypothesis about junction forming rate and junction breaking rate was proposed to explain the different results for glass and polycarbonate. . The frictional data have been incorporated into our models of the primate fingertip to make the simulations of stroking of stimulus objects more realistic. Investigation of the Internal Geometry and Mechanics of the Human Fingertip In Vivo using Magnetic Resonance ImagingTo gain insight into the mechanistic bases of the human tactile sensory system, we have developed a series of increasingly detailed biomechanical models of monkey and human fingertips. These models are necessary to generate testable hypotheses on tactile neural coding. Although 3D models of human and monkey fingertips with realistic external geometry and multi-layered interior have been completed, the geometry and material properties of the internal layers have been idealized. Empirical data on deformation of the internal layers is essential for validating these models. We employed advanced techniques in Magnetic Resonance Imaging (MRI) to obtain realistic internal geometry and deformation of the tissue layers of the in vivo human fingerpad. The fingerpads of four subjects were statically loaded with various indenters to examine the effects of indentation depth and indentor shape on tissue deformation. Geometric surfaces, such as edges, rectangular bars, and cylinders were used to load the fingertip. Using a 4.7 Tesla magnet and a RARE sequence, we obtained images with in-plane resolutions much higher (125mm x 125mm) than typical clinical MRI data. Digital image processing was used to filter the images and to detect the boundaries of the tissues located in the fingertip. Edge detection algorithms based on conformable contours ("snakes") allowed for separation of tissue layers. Published data on histology and anatomy were used to identify each tissue layer in the fingertip. The geometric information extracted from each tissue layer was used to examine tissue deformation during loading, and is being used to improve the realism of the computational models. These data confirmed our earlier simulations that predicted soft tissues of the fingerpad act as low pass filters, attenuating the high spatial frequencies of edges and corners imposed on the skin surface before they reach the mechanoreceptors below. Additionally, MRI confirmed that the fingerpad is compressible under load. These findings suggest MRI will be useful for further investigation of static loading and, in the future, dynamic loading of the fingertip. Experimental Investigation of the Biomechanics of Papillary RidgesWe have begun using video microscopy of cadaver tissue cut in cross section to observe tissue biomechanics with spatial resolution (~2 mm/pixel) higher than in vivo methods (MRI and UBM) allow. This technique facilitates study of some basic issues in touch transduction. Specifically, we hope to observe whether the papillary ridges concentrate strain in the tissue around mechanoreceptors. If so, we will have empirical evidence for a sensory function of fingerprints. We are also investigating the role of papillary ridges in detecting small (< 1 mm) features projecting from an optically smooth surface. 3. Neurophysiology and PsychophysicsTactile Coding of ShapeA salient feature of tactile sensing is its ability to encode and decode the shape of objects. In collaboration with Prof. LaMotte of Yale University School of Medicine, we have recorded the responses of SAIs and RAs to a variety of 2-D and 3D shapes stroked across the monkey fingerpad. One set of experiments involved 2-D "wavy surfaces", i.e., surfaces composed of smooth, alternating convexities and concavities of differing radii of curvature. The second set of experiments employed 3D toroidal objects mounted on a flat plate. With wavy surfaces, it was shown that only convexities were encoded in the neural responses; concavities evoked no responses. The primary findings from both sets of experiments were as follows: (a) discharge rates encode the magnitude and rate of change in the curvature of the skin produced by an object, (b) the orientation and shape of the two-dimensional outline of the object parallel to the skin are represented by the orientation and shape of the region of neural activity in both SA and RA populations, (c) object shape perpendicular to the skin is encoded in the shape of the object SA SPR (Spatial Population Response), (d) When object curvature is constant (e.g., circular cylinders), the slopes of the rising and falling phases of the SA response profile are constant, and (e) spatial measures of shape (width and average slope from base to peak) were generally found to be invariant with changes in the orientation of the object as well as the velocity and direction of stroking. Using a novel paradigm we have also investigated how populations of RAs and SAIs encode shapes. Toroidal 3D objects were indented at a fixed location on the monkey finger pad, and an estimate of the responses from a spatially distributed population of mechanoreceptors was obtained by successively recording single fiber responses and plotting the collection of responses on a "virtual'' monkey fingerpad. This was a shift from the usual experimental paradigm where ``population response'' is estimated by applying the stimulus to various locations in the receptive field of a single afferent fiber. A major conclusion from these studies was that the Spatial Population Response Profiles (SPR) of SAs coded stimulus shape and orientation unambiguously, while the RA SPR coded neither. This shape code is expected to be essentially invariant with changes in force or velocity of indentation, as demonstrated for raised toroidal objects on a planar surface described above. Tactile Coding of SoftnessEncoding of softness is perhaps even more important in tactile sensing than that of shape, because softness can only be sensed accurately by direct touch whereas shape can be inferred through vision as well. We have described, for the first time, how primates discriminate between objects of different compliances and described the biomechanical and neural basis of the perception of softness. We have shown that compliant springs with rigid surfaces ("spring-cells") required both kinesthetic and tactile information for softness discrimination, whereas for soft rubber objects of different compliances, tactile information alone was sufficient. The reason is that for a given force applied by a compliant object to the skin, the spatial pressure distribution and skin deformation within the contact region depend on the specimen compliance if the object has a deformable surface (e.g., fruits), but is independent of the specimen compliance if its surface is rigid (e.g., piano key). Thus, tactile information alone is necessary and sufficient to encode the compliance of rubber-like objects. We then focussed on finding a more quantitative neurophysiological and biomechanical basis for softness encoding. Using a computer-controlled tactile stimulator, we applied rubber specimens to the finger pads of anesthetized monkeys in a controlled manner and recorded the neural response from SAI and RA fibers. The discharge rates were observed to be lower in the SAI fiber's response to softer specimens compared to stiffer ones. In contrast, RA response was found to be practically indifferent to the relative variations in stiffness. Thus, it was concluded that tactile discrimination of softness was based more on the discharge rates from the SAIs than from the RAs. It was also found that when specimens were applied to the fingerpad at the same velocity, the softer the specimen, the lower the rate of change of net force and the higher the rate of change of overall contact area. Thus at a given instant during indentation, the difference in the average pressure between the two specimens was higher than the corresponding differences in either the forces or the contact areas. Just as the pressure increased more slowly for the softer specimen, the SA discharge rate also increased more slowly, resulting in a slower increase in cumulative impulses. However, the velocity of indentation affected the force, contact area, and discharge rate. For the same specimen, the lower indentation velocity resulted in lower force and area rates, giving rise to a lower discharge rate at a given instant during the ramp. Since the discharge rate of a single fiber is affected by both the compliance of the specimen and the indentation velocity, specimens of differing compliances could be made to give rise to the same single fiber response by appropriate adjustment of indentation velocity. Thus, discharge rate in a single SAI fiber cannot unequivocally encode the compliance of an object, but a population of spatially distributed SAIs can. Psychophysics of tangential skin displacementsTangential displacement of the skin (as opposed to normal indentation) is an interesting tactile stimulus. To detect small (< 1 mm) features, humans must scan the fingertip over a surface, presumably to induce tangential displacements. We have begun measuring subjects' sensitivity to small tangential displacements of the finger print skin. Preliminary data from 5 subjects stimulated at 5 Hz (150 mm peak excursion) indicate that humans find tangential displacements about as intense as normal displacements of the same magnitude. Sensitivity shows a weak correlation with the orientation of the finger ridges. Further work will measure sensation thresholds over a range of frequencies. 4. Computational ModelsIn order to better understand the mechanics of touch, it is necessary to establish a quantitative relationship between the stress/strain state at a mechanoreceptor location and the neural response of the receptor to a given mechanical stimulus. Due to the subsurface locations of the receptors and the opacity of the skin, the stress state and deformations in the close vicinity of a receptor cannot be observed experimentally in vivo. Moreover, no experimental techniques exist to record the responses from a population of mechanoreceptors. A mechanistic model of the skin and subcutaneous tissues that is validated through biomechanical and neurophysiological experiments is able to establish the stress/strain stimulus to a mechanoreceptor as well as predict the population response to a given stimulus. Therefore, we developed a series of increasingly realistic 2-D and 3D finite element models of the primate fingertip. We summarize below the development of the 3D model and the biomechanical and neurophysiological results obtained from it. Development of 3D Layered Model of Human and Monkey FingertipsThe external geometry of human and monkey fingertips was obtained from precise epoxy casts made using dental cement molds. These casts were extremely accurate in reproducing the finger print ridges, details of the nail and wrinkles on the skin. A videomicroscopy setup consisting of a monochrome CCD camera with zoom lenses, a frame grabber, and a PC was used to acquire images of the casts in different orientations. A stepper motor was used to rotate the fingertip about an axis parallel to the bone axis in 1-degree steps, and an image was grabbed at each step. The boundary of the fingertip in an image frame essentially represented the orthographic projection of the fingertip for that particular orientation. These 2D sections were imported into a solid modeler (PATRAN) and a 3D model of the fingertip with realistic external geometry was generated. The relative thickness of the bone in the distal phalanx was determined from X-ray images and a concentric bone was generated inside the fingertip. To account for the several layers of skin and the adipose tissue underneath, the mesh was generated in layers such that each layer could be assigned a distinct material property and mechanistic constitutive behavior. The material of each layer was treated as linear isotropic and the innermost layer was made several orders of magnitude stiffer than all the other layers to simulate the rigid behavior of the bone. Two models with 8-noded isoparametric elements were generated and the number of nodes in the two models were 8500 and 30,000 respectively. The typical diameter of the monkey fingertips was approximately 9 mm and element size in the region of contact with indenters was approximately 500 microns and 160 microns for the two models respectively. Encoding and Decoding of Shape during Static Tactile SensingThe model described above was used to simulate static indentation of the fingertip by rigid objects of different shapes such as cylinders rectangular bars, and sinusoidal step shapes. The large number of computations necessary to achieve a high spatial resolution and realism in the simulations required the use of a supercomputer (Cray C90). The results show that contact mechanics is important in governing the pressure distribution on the skin surface, which, in fact, is the stimulus unique to each shape. This surface pressure distribution within contact regions was found to be highly dependent on the curvature of the object that indented the finger. Further, we have shown that a simple equation is able to predict the surface pressure as a function of the indenting object's curvature and the local depth of indentation. To study the mechanism of transduction by the mechanoreceptors (transformation of the mechanical stress state into neural signals), 21 mechanical measures were obtained from the calculated stress and strain tensor at mechanoreceptor locations, and were matched with experimentally recorded neural response data. Three quantities - maximum compressive strain, maximum tensile strain and strain energy density - were found to be related to the neural responses of SA-I nerve fibers through a simple scaling-threshold model and are thus possible relevant stimuli for SA-I afferents. Among these, strain energy density is more likely to be the relevant stimulus since it is a scalar that is invariant with respect to receptor orientations and is a direct measure of the distortions of the receptor caused by the loads imposed on the skin. To identify the object contacting the skin, the CNS should be able to compute surface loads imposed on the skin from the peripheral neural response. To simulate this inverse problem of decoding, a nonlinear shift-invariant system, which treats the surface pressure as input and neural responses as output, was developed. Because of the nonlinearity (the relevant stimulus measures, such as the strain energy density, are nonlinear functions of the Cartesian stress-strain components), a simple inverse transformation cannot be applied. A signal estimation technique using the university method used in non-linear optimization techniques was employed to decode the surface pressure function from the neural response function. The decoding was demonstrated to be valid for both the ideal case where no sensor noise is present as well as the case where the sensor noise (assumed to be additive Gaussian) is present, as long as the signal-to-noise ratio is greater than 20 dB. This result shows a method by which the central nervous system could infer the shape of the object contacting the skin from SAI population response under static conditions. Modeling the Dynamics of the Primate FingerpadThe previous section describes our fingertip models that are able to explain and predict both biomechanical and neurophysiological phenomenon observed in experiments with static stimuli. Encouraged by this success, we have now begun to model the dynamic behavior of the fingerpad in order to realistically simulate the neurophysiological experiments involving dynamic stimuli, such as under stroking of shapes. We have now incorporated viscoelasticity into our computational models of the primate fingertip. To this end, the biomechanical data obtained from the indentation of the fingerpads of several human subjects using different indentor geometries was used. A consistent normalization scheme was developed which showed that most of the variation in the data obtained across subjects was scalable by a single parameter. This lead to the development of a second order Kelvin model which satisfactorily explains much of the observed force-displacement data for a truncated conical indentor. The Correspondence Principle was invoked to extend these results to obtain the material parameters of a generalized 3D linear viscoelastic continuum. These parameters were then incorporated into a 2D plane strain and a 3D layered finite element model. The results obtained from these computational models predict the observed force-displacement data very well for all the indenters (truncated conical, cylindrical and flat-plate indenters) used in the earlier biomechanical experiments. These models are now being used to simulate dynamic stimuli imposed on the fingerpad, such as stroking of shapes in order to understand the role of mechanoreceptors during haptic exploration. Neurophysiological recordings from slowly adapting (SA) and rapidly adapting (RA) mechanoreceptors have been made for a variety of shapes, both statically indented and dynamically stroked across the fingerpad. Previous biomechanics research has been to determine the mechanics underlying the role of SAs during static indentation. Mechanical cues have been determined which relate curvature to impulse response of the receptor. The purpose of the current investigation is to determine the mechanical response of both SAs and RAs during dynamic stroking, and to develop a unifying model of the role of each mechanoreceptor in touch sensation. Skin Dynamics in the Tactile Encoding of Shape using a Realistic 2D Finite Element ModelUsing previously obtained MRI images of the human finger, we created a multilayered finite element model that accurately represented the internal and external geometry of the human fingerpad. By matching model predictions with biomechanical experimental data, the viscoelastic parameters for each skin layer were estimated and the biomechanical behavior of the model was validated. Figure 1 compares the finite element analysis results of a 1/16 inch rectangular bar indenting the finger to the actual finger deformation obtained from MRI imaging. To simulate the mechanics of touch, surfaces of different curvatures were indented into the finger model, and the contact force was held constant until steady state conditions were reached. In addition, a surface of alternating convex and concave segments, each with a different curvature, was stroked across the finger at various velocities. The results from the simulation studies were compared with previously obtained neurophysiological data from the corresponding experiments.
The principal findings are as follows. (1) Under both indentation and stroking of shaped objects, the contact pressure across the fingerpad is the primary mechanical stimulus, and it is found to be directly proportional to the object curvature. (2) The use of a layered model, as opposed to a homogeneous model, has a profound effect on the shape of the contact pressure distribution across the skin surface. (3) The strain energy at depths below the skin surface can be predicted from a convolution sum of the contact pressure distribution. (4) A linear combination of the strain energy and the strain energy rate at typical mechanoreceptor locations can reasonably predict the SA-I neural response during both indentation and stroking experiments. The method of finite spheres: a meshless computational technique for biomechanical simulationsWe have used the finite element method extensively to model the fingerpad and analyze the stress/strain fields at the mechanoreceptor level. Both two-dimensional and three-dimensional models have been developed and analyzed using the finite element software package ABAQUS. Even though the finite element method is a robust numerical technique to solve elastostatic (e.g. indentation) and elastodynamic (e.g. stroking) problems, considerable amount of time and energy is devoted to the development of the finite element mesh. Moreover, once a particular model has been developed, it is extremely time consuming to modify it. To overcome these problems we have developed a novel computational technique, the method of finite spheres, which does not require a background mesh for discretization. This technique is very similar to the finite element method and is equally robust, but uses a set of nodes sprinkled on the computational domain to develop the discrete set of linear algebraic equations. We have successfully tested the method on several example problems. 5. TheoryNonlinear Dynamics of Mechanoreceptor ResponseOne of the most interesting aspects of dynamic tactile sensing in humans is the nature of mechanoreceptor response to dynamic stimuli. In contrast to the response of the fingerpad tissue, the receptors seem to exhibit nonlinear behavior even for very small indentations of the fingerpad skin. The most classic example of such nonlinear response is the so called "tuning curves" which are nothing but the variations of dead-zone and saturation thresholds as functions of frequency of input sinusoids. In order to model these nonlinearities, a generalized class of cascaded LNL-type filter banks were developed. Such models, in general, incorporate a linear describing function block followed by a static nonlinearity and another linear describing function block. It was observed that different receptor classes could be described by specializing this general model. For instance, the behavior of the SAI mechanoreceptors could be explained very well using a Hammerstein type of structure (a static nonlinearity followed by a linear dynamic block). These models provided good fits to the empirically recorded mechanoreceptor responses. The next step appears to be a successful link between the finite element model describing the geometric and material properties of the fingerpad and the neuro-dynamic transduction blocks, describing receptor behavior for each class of receptors. We are now in a position to predict the spatial response profiles observed during the stroking of complex shapes (toroids, wavy surfaces and sinusoidal step shapes) on primate fingerpads. Identification and Control of Haptic Systems: A Computational TheoryThis research provides a theoretical framework for haptics, the study of exploration and manipulation using hands. In both human and robotic research, an understanding of the nature of contact, grasp, exploration, and manipulation is of singular importance. In human haptics the objective is to understand the mechanics of hand actions, sensory information processing, and motor control. While robots have lagged behind their human counterparts in dexterity, recent technological developments have made it possible to build tactile sensor arrays that mimic human performance. We believe that a computational theory of haptics that investigates what kind of sensory information is necessary and how it has to be processed is beneficial to both human and robotic research. Human and robot tactile sensing can be accomplished by arrays of mechanosensors embedded in a deformable medium. When an object comes in contact with the surface of the medium information about the shape of the surface of the medium and the force distribution on the surface is encoded in the sensor signals. The problem for the central processor is to reliably and efficiently infer the object properties and the contact state from these signals. We first investigated the surface signal identification problem: the processing of sensor signals resulting in algorithms and guidelines for sensor design that give optimal estimates of the loading and displacement distributions on the surface of the fingerpad. We have shown that three quantities, mean normal stress and the two shear strains at mechanosensor locations, are not only necessary and sufficient to infer the surface signals, but also maximize the spatial bandwidth of signal reconstruction. We then focused on how the information obtained from such optimal sensing can be used for exploration of objects. We have shown that an accurate reconstruction of object properties can occur using two basic building blocks of Exploration Strategy and Finger Control. Exploration Strategy pertains to the problem of inferring object properties such as shape, texture and compliance, and interference properties such as state of contact, from the estimated surface signals. This involves determining, in each case, what kind of sensor information and what kind of action is needed. Finger Control refers to the transformation of the action needed into a command trajectory for the fingerpad, which defines the desired direction of movement for manipulation. We have defined and analyzed the components of both these blocks, provided explicit mathematical formulation, and have solved numerical examples where appropriate. Our formulation of this computational theory of haptics is independent of implementation so that it is applicable to both robots and humans. 6. Device Design and ConstructionUltrasound Backscatter Microscope for In Vivo Imaging of Human FingertipOne of the conclusions of our earlier MRI studies was that if a noninvasive imaging system with higher resolutions than MRI could be designed, it would be a powerful tool to observe deformations of the skin tissue around mechanoreceptors and would help validate our computational models. We have now developed an Ultrasound Backscatter Microscope (UBM), which is able to display the geometry and deformation of skin layers in vivo. UBM is similar to B-mode diagnostic ultrasound imaging, but uses higher frequency acoustic waves (about 50 MHz) to achieve resolutions of the order of tens of microns. In UBM, contrast depends on the mechanical properties of tissues, a feature that complements techniques such as optical microscopy, CT and MRI that rely on other tissue properties. This feature also makes UBM ideal for studying the mechanistic basis of tactile sensing. In addition, UBM is less expensive than most imaging techniques, and is also noninvasive. However, because of increased attenuation of the acoustic waves at higher frequencies, the tissues being imaged must be located within a few millimeters of the surface. A UBM system was designed and built using a high frequency PVDF transducer (nominal frequency of 75 MHz), a pulser, a digitizing oscilloscope, a scanning system and the IEEE488 interface. The device was used to image the internal structure of the human fingertip skin in vivo . At each skin location, the transducer was energized and echoes from tissues at different depths were recorded. By mechanically scanning the transducer across the fingerpad surface and keeping track of signals from successive lateral locations, data on mechanical contrast in skin cross sections were assembled. Signal processing was done on the echoes to obtain 2-D images. Images of fingerpad skin of six human subjects showed three distinct layers up to a depth of about 1.2mm. Comparison images of fingertip skin on the dorsal side also showed a layered structure, with lesser thickness for the first two layers. The data obtained are consistent with known anatomical information that the three layers imaged are the stratum corneum, the rest of the epidermis, and the top region of the dermis. These are the skin layers where the Meissner Corpuscle and the Merkel cells are present. Although the current resolutions (150 microns laterally x 20 microns axially) of the UBM are sufficient for now, we believe these can be cut down to 30 microns x 10 microns with moderate changes. Even better resolutions may be possible with more complex calibration and signal processing. The UBM is designed to be portable, and therefore it may be possible to use it to image the deformation around a mechanoreceptor location while simultaneously recording its electrophysiological response. We had previously developed an ultrasound backscatter microscope system that employs high frequency ultrasonic waves (50 MHz) for obtaining high resolution images of the human fingertip. We are currently extending the research to clinical applications such as skin cancer detection. The main focus of this work is the development of physically-based algorithms for characterizing normal and cancerous skin tissues. Unlike conventional image processing algorithms that act only on the final images produced by the ultrasound device, these algorithms will exploit the physics of interaction of acoustic waves with skin tissues. One such method that is being studied is the difference in spectral patterns in backscattered signals from different tissues. We are also developing computer simulations of acoustic scattering phenomena that will aid both the development and the testing of algorithms. Work over the past year also includes automating the scanning of the transducer using a 3-axis computer-controlled positioning system used in the imaging system. Using linear encoders for feedback we were able to obtain a positioning accuracy of 1 micron. We also developed custom-designed software for controlling the positioning and integrating it with the data acquisition software. High Precision Tactile Stimulator for Dynamic Stimulation of the FingerpadAlthough our 2-axis tactile stimulator is still operational, its force and positional resolution as well as bandwidth were found to be in need of improvement in order to determine the effect of skin viscoelasticity on RA responses at stimulation frequencies higher than about 20 Hz. A high precision tactile stimulator was built to allow us to refine the dynamic fingerpad model. The actuator is a disk-drive head-positioning motor coupled with angular position feedback from a precision rotary variable differential transformer (RVDT). A digital, real-time PID controller is implemented using a floating-point DSP system. Any indentor shape can be attached to the device to provide one-degree of freedom position-controlled inputs in either the normal or tangential direction to the fingerpad surface. The force response is measured with a piezoelectric transducer that deflects only 2 nm for the maximum expected force of 2 N. The stimulator operates smoothly in the bandwidth of 0.1 Hz to 300 Hz. Positions can be resolved to 600 nm while forces can be resolved to 3 mN. To determine the mechanical properties of the human fingerpad in vivo, two linearly independent experiments in the linear range of the tissue were performed to solve for the dynamic, viscoelastic mechanical properties of the human fingerpad. The impulse response bulk modulus and the impulse response shear modulus are computed as a function of frequency. The impulse response bulk modulus varies from 55 kPa at 2 Hz to 8 MPa at 200 Hz. The impulse response shear modulus varies from 90 kPa at 2 Hz to 8 MPa at 100 Hz. PublicationsBirch AS and Srinivasan MA, Experimental Determination of the Viscoelastic Properties of the Human Fingerpad, Touch Lab Report 14, RLE TR-632, MIT, September 1999. Karason S, Srinivasan MA, and Annaswamy AM, Encoding and decoding of static information in tactile sensing systems, Intl. J. Robotics Research, Vol. 18, No. 2, pp. 131-151, 1999. Liao JC and Srinivasan MA, Experimental Investigation of Frictional Properties of the Human Fingerpad, Touch Lab Report 11, RLE TR-629, MIT, September 1999. Raju BI and Srinivasan MA, Tactile Coding of Static Shapes: Relevant Stimulus for Slowly Adapting Type I Mechanoreceptive Afferents in Primates. 2000 (in preparation). Raju BI and Srinivasan MA, Ultrasound Backscatter Microscope for In Vivo Imaging of Human Fingertip, Touch Lab Report 13, RLE TR-631, MIT, September 1999. Raju BI and Srinivasan MA, Encoding and Decoding of Shape in Tactile Sensing, Touch Lab Report 12, RLE TR-630, MIT, September 1999. Srinivasan MA and Raju BI, Contact Mechanics in Tactile Coding of Static Shapes Investigated using Three Dimensional Models of the Primate Fingertip. 2000 (in preparation). ThesisSkin Dynamics in the Tactile Sensing of Shape, Joshua P. Cysyk, Dept. of Mechanical Engineering, MIT, September, 1999. |
||
| Last Updated: May 8, 2002 1:45 PM | Comments: David Schloerb |