 For characterizing the mechanical behavior of organs, we used a haptic feedback
device, the Phantom, as a mechanical stimulator to obtain in-vivo force-displacement
characterization of the liver and lower esophagus of pigs when subjected
to ramp and hold, and sinusoidal indentations. Examples of the results are
shown in the figure above..
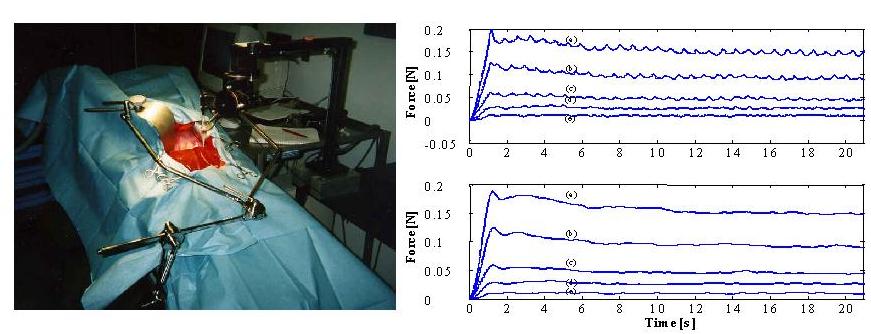
For characterizing the mechanical behavior of organs, we used a haptic feedback
device, the Phantom, as a mechanical stimulator to obtain in-vivo force-displacement
characterization of the liver and lower esophagus of pigs when subjected
to ramp and hold, and sinusoidal indentations. Examples of the results are
shown in the figure above..
Publications:
Tay, B., De, S., and Srinivasan, M. A., (2002), “ In vivo force response
of intra-abdominal soft tissues for the simulation of laparoscopic procedures”,
Medicine Meets Virtual Reality:10, Newport Beach.
|
